Servomotor der Ik3-Serie, Bus-Servoantrieb, Motorservo, Wechselstrommotor, Elektromotor, Servo 380 V, 0,75 kW, 1 kW, 2 kW, 3 kW
PRODUKTVORTEILEHohe Leistung · Frequenzgang der Stromschleife > 2,5 kHz: 16-Bit-Stromabtastgenauigkeit; Dual-Sampling-
Beschreibung
Basisinformation.
| Modell Nr. | ZSD-iK3BS25EA |
| Marke | Schritt |
| Transportpaket | Karton |
| Warenzeichen | SCHRITT |
| Herkunft | Shanghai, China |
| HS-Code | 9032899090 |
| Produktionskapazität | 5000 Stück/Jahr |
Produktbeschreibung
PRODUKTVORTEILEHohe Leistung· Frequenzgang der Stromschleife > 2,5 kHz: 16-Bit-Stromabtastgenauigkeit; Dual-Sampling- und Dual-Update-Algorithmen
· Frequenzgang des Geschwindigkeitsregelkreises > 1,6 kHz: 23-Bit-Absolutwertgeber; Kalman-Beobachtungsalgorithmus
· Bussynchronisationsgenauigkeit < 0,1 µs: Mehrachsiger Synchronisationsalgorithmus auf aktueller Ringebene
· Schnellere Servomotorgeschwindigkeit: schwache magnetische Beobachtungs- und Steuerfunktion, damit der Servomotor das Maximum erreicht
Geschwindigkeit im Handumdrehen
Große Anpassungsfähigkeit
· Standard-EtherCAT-Kommunikationsprotokoll, das an jeden EtherCAT-Buscontroller angepasst werden kann
· Mit detaillierten Funktionen wie aktive Resonanzunterdrückung, End-Jitter-Unterdrückung, Reibungskompensation, Groove
Drehmomentkompensation usw. kann die Servoleistung unter verschiedenen mechanischen Strukturen perfektioniert werden
· Verdickter dreischichtiger Lackierprozess für eine bessere Anpassung an die Umwelt (Feuchtigkeit, Korrosion usw.).
Sicherer
· Mit Sicherheitsfunktion nach internationalem Standard, SS1/SS2/SBC, sicher und zuverlässig
Leicht zu bedienen
· Zur Parametereinstellung und Überwachung des Servo- und Motorstatus ist ein optionales Handbedienfeld erhältlich.
Dadurch wird das Debuggen des Systems komfortabler
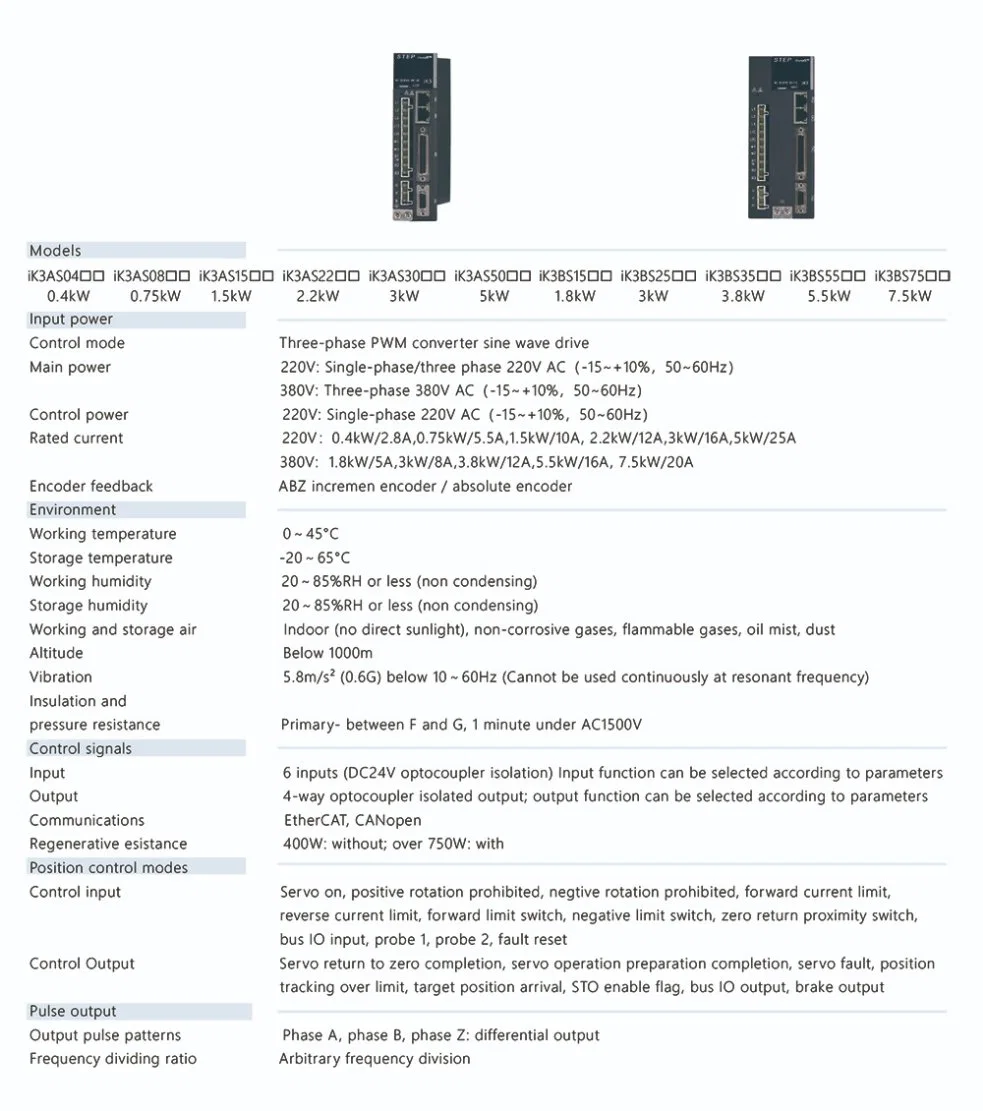
Spezifikationen:
| Serie | iK3-Bus-Servomotor | |||||||
| AC 380V Leistungsstufe (kW) | 3 | |||||||
Grundlegende Spezifikationen | Steuermodus | IGBT-PWM-Steuerung, Sinusstrom-Antriebsmodus. | ||||||
220 V: ein- oder dreiphasige Vollweggleichrichtung. | ||||||||
Encoder-Feedback | Inkrementeller Standardtyp mit 2500 Zeilen | |||||||
17-Bit-Inkrementalgeber | ||||||||
Gebrauchszustand | Verwendung/Lagerung Temperatur*1 | 0~45°C (bitte verwenden Sie eine niedrigere Rate, wenn die Umgebungstemperatur 45°C oder mehr beträgt und die Die durchschnittliche Belastungsrate darf nicht höher als 80 % sein.)/40–70 °C | ||||||
| Luftfeuchtigkeit bei Verwendung/Lagerung | 90 % relative Luftfeuchtigkeit darunter (nicht kondensierend). | |||||||
| Vibrations-Resistenz/ Schlagfestigkeit | 4,9 m/s2 / 19,6 m/s2 | |||||||
| Höhe | Unter 1000m | |||||||
Spezifikationen der EtherCAT-Slave-Station | Grundlegende Eigenschaften der EtherCAT-Slave-Station | Kommunikationsprotokoll | EtherCAT-Protokoll | |||||
| Support-Services | CoE (PDO, SDO) | |||||||
| Synchronisationsmodus | DC-verteilte Uhr | |||||||
| Physikalische Schicht | 100BASE-TX | |||||||
| Baudrate | 100 Mbit/s (100Base-TX) | |||||||
| Duplexmodus | Vollduplex | |||||||
| Topologiestruktur | Ring- und linearer Typ | |||||||
| Übertragungsmedium | Ein abgeschirmtes Super 5-Netzwerk oder besser | |||||||
| Übertragungsentfernung | Die Entfernung zwischen den beiden Knoten beträgt weniger als 100 m (gute Umgebung und ausgezeichnetes Kabel). | |||||||
| Anzahl der Slave-Stationen | Das Protokoll unterstützt bis zu 65535, es werden jedoch nicht mehr als 100 verwendet | |||||||
| Länge des EtherCAT-Frames | 44~1498 Byte | |||||||
| Prozessdaten | Die maximale Größe eines einzelnen Ethernet-Frames beträgt 1486 Byte | |||||||
| Synchronisationsjitter zwischen zwei Slave-Stationen | < 1us | |||||||
Aktualisierungszeit | Die Ein- bzw. Ausgabe von 1000 Schaltvorgängen beträgt etwa 30us | |||||||
| 100 Servoachsen sind etwa 100US | ||||||||
| Kommunikationsfehlerrate | 10-10 Ethernet-Standards | |||||||
EtherCAT-Konfigurationseinheit | FMMU-Einheit | 8 Stk | ||||||
| Speichersynchronisierung Verwaltungseinheiten | 8 Stk | |||||||
| Prozessdaten-RAM | 8 KB | |||||||
| Taktverteilung | 64-Bit | |||||||
| EEPROM-Kapazität | 32Kbit | |||||||
Analoge Signale | Analoger Geschwindigkeitsbefehlseingang | Eingangsspannung | -10V~ + 10V | |||||
| Analoger Drehmoment-Befehlseingang | Eingangsspannung | -10V~ + 10V | ||||||
Eingangs-/Ausgangssignal | Abbildung Eingangssignal | Die Signalverteilung kann geändert werden | 5-Zeilen-DI | |||||
| DI-Funktion: Servoantrieb ermöglicht Vorwärtsbewegungsverhinderung, Rückwärtsbewegungsverhinderung, Vorwärtsstrombeschränkung, Rückwärtsstrombegrenzung, Vorwärts-Endschalter, negativer Endschalter, Rückkehr-Null-Näherungsschalter, Bus-IO-Eingang, Sonde 1, Sonde 2, Fehler-Reset | ||||||||
Abbildung Ausgangssignal | Die Signalverteilung kann geändert werden | 3-zeiliges DO | ||||||
DO-Funktion: Nullpunkt-Rückführung des Servos, Abschluss der Vorbereitung des Servobetriebs, Servofehler, Überschreitung der Positionsverfolgungsgrenze, Erreichen des Zielorts, STO-Aktivierungszeichen, Bus-IO-Ausgang, Bremsausgang | ||||||||
Integrierte Funktionen | Überhubverhinderungsfunktion (OT). | Stoppen Sie sofort, wenn P-OT und N-OT wirken | ||||||
| Elektronisches Übersetzungsverhältnis | 0,1048576 ≤ B/A ≤ 419430,4 | |||||||
| Schutzfunktionen | Überstrom, Überspannung, Spannungsmangel, Überlastung, Ausnahmen des Hauptstromkreises, Überhitzung des Kühlkörpers, Ausfall einer Phase, Übergeschwindigkeit, Encoder-Anomalie, CPU-Anomalie, Parameter-Anomalie usw. | |||||||
| LED-Anzeigefunktion | Hauptstrom geladen, angezeigt durch 5-Bit-LED | |||||||
| RS232-Kommunikation | Statusanzeige, Benutzerparametereinstellung, Monitoranzeige, Alarmverfolgungsanzeige, JOG-Betrieb und Selbstoptimierungsbetrieb, Geschwindigkeit, Drehmomentbefehlssignalzuordnung und andere Funktionen | |||||||
| Andere | Verstärkungsanpassung, Alarmprotokollierung | |||||||
Qualitätsmanagementsystem 1. BeschaffungskontrollverfahrenWählen Sie qualifizierte Lieferanten aus, um sicherzustellen, dass die Materialqualität den Nutzungsanforderungen gerecht wird.2.ProduktionsprozessablaufJeder Mitarbeiter muss die Qualifikationsprüfung für die Stelle bestehen und in strikter Übereinstimmung mit den Prozessdokumenten arbeiten.3. QualitätskontrollverfahrenZur Qualitätskontrolle wird ein breites Spektrum an Maßnahmen eingesetzt: Werksaudit, Unterzeichnung einer Qualitätsvereinbarung mit Lieferanten, Wareneingangskontrolle, Bestätigung des ersten Produkts, Inspektion während der Produktion, Endkontrolle, Analyse und Verbesserung des Produktionsprozesses, Korrektur- und Vorbeugungsmaßnahmen.
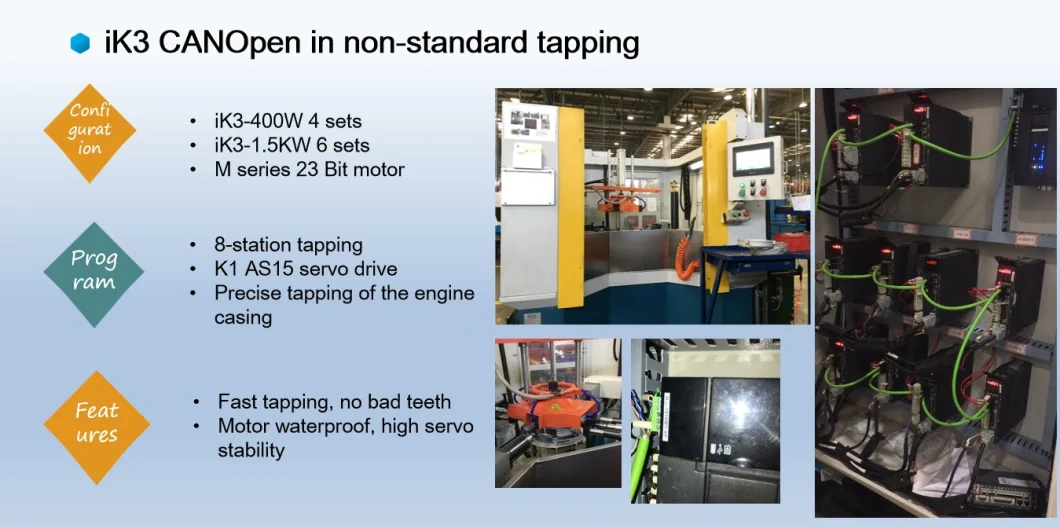
Anwendung:
· Industrieroboter
· Lithium Batterie
· Glasschnitzerei
· Bühnentechnik
· Metallschleifen
Unternehmen:


Labor:

Kultur:
Vergeben:Gewann die jährliche Benutzerzufriedenheitsmarke 2018 im Bereich Bewegungssteuerung!
Zertifikat:
Unser Kontakt
Schick jetzt